近期,哈尔滨工业大学(深圳)医工学院冷雨泉教授团队在自动化与智能控制领域国际权威期刊《IEEE Transactions on Automation Science and Engineering》发表题为《Estimation and Prediction of CoM with Terrain Feature Embedding During Walking》的研究论文,首次提出融合地形信息的质心轨迹估计与预测方法。该研究通过可穿戴视觉惯性模块采集人体运动与环境数据,结合地形编码与时序神经网络模型,实现了对多地形行走中人体质心轨迹的高精度、低延迟预测,为可穿戴设备在动态环境中实现稳定性控制与人机自然交互提供了全新思路。
随着可穿戴机器人的广泛研究与快速发展,外骨骼与动力假肢等设备已被证明能够有效降低使用者的能量消耗,或帮助行动障碍人士完成日常行走。然而,相较于传统机器人,可穿戴设备需要时刻适应穿戴者的状态变化,特别是在面对老年人或步态异常人群时,如何保障行走过程中的平衡稳定性成为其核心挑战之一。
其中,人体质心的估计与预测被认为是实现平衡控制的关键环节。将人体质心的当前与预测状态引入可穿戴设备的控制器中,有望提升设备的稳定性和自然交互体验。
然而,当前质心轨迹估计及预测仍面临三大挑战:一是质心状态的准确定位方法仍不够便捷,难以适配复杂多变的日常行走环境;二是在多地形与地形切换场景中,质心轨迹的预测精度难以保障;三是现有方法计算代价高,难以实现在可穿戴设备上的实时部署。
针对质心状态预测在多地形行走场景下的关键挑战,本研究提出了一种融合地形信息的质心轨迹估计与预测框架,系统整合感知、建模与预测三大环节,为可穿戴设备提供高精度、可部署的解决方案。整体方法由三个核心模块构成:
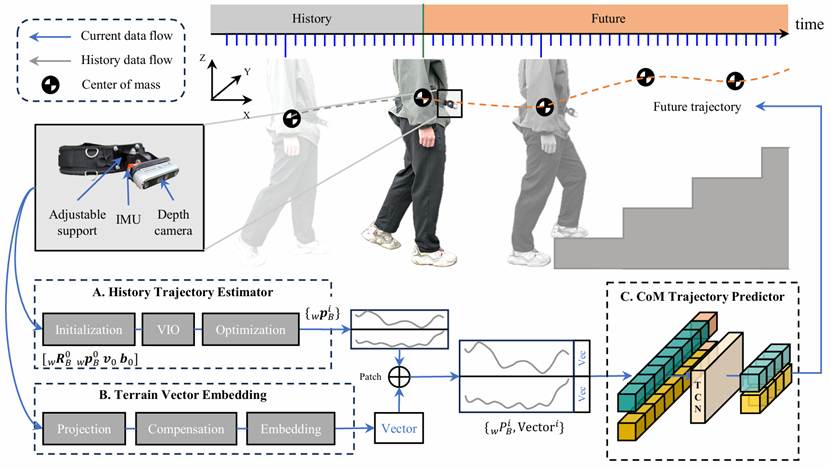
历史轨迹估计模块采用视觉惯性里程计技术,通过双目相机与高精度惯性测量单元协同工作,实时估计人体质心的空间位姿与历史轨迹,为预测模型提供稳定且精准的输入;
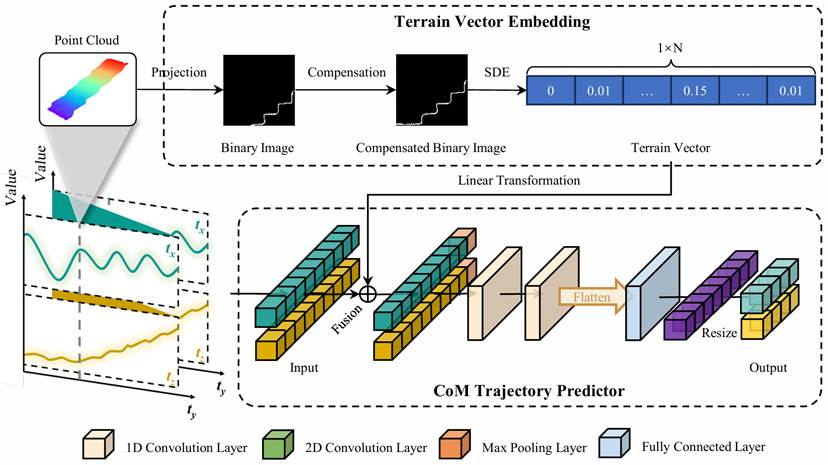
地形向量编码模块提取行走环境中的几何特征,并将其编码为结构化的地形向量,使预测模型具备对未来地形变化的感知能力,增强其适应性与泛化能力;
质心轨迹预测模块融合历史轨迹与地形编码信息,采用轻量化神经网络对未来数步内的质心运动趋势进行预测,在保证精度的同时兼顾可部署性与实时性。
为验证方法有效性,研究在两种典型环境下采集了真实的质心轨迹数据,分别包含更为复杂与极端的地形条件以及日常结构化地形,用于网络的训练、验证与测试。实验结果表明,所提出的预测网络能够捕捉个体的行走习惯,并生成形状近似的质心轨迹。同时,在地形转换处,地形特征编码为模型提供了有效的先验信息,使预测轨迹更符合实际地形变化,表现出良好的场景适应能力。
本研究提出了一种融合地形信息的质心轨迹估计与预测方法,旨在提升可穿戴设备在行走过程中的感知能力与稳定性控制。通过可穿戴视觉惯性模块获取历史质心轨迹与环境信息,结合地形向量编码与时序卷积网络,实现了对多地形和地形转换场景下未来质心运动趋势的快速准确预测。该方法在多个日常行走环境中表现出良好的预测精度与实时性,侧摆和高度方向上的归一化均方根误差分别为0.1567和0.1066,单次预测延迟仅为8毫秒。研究结果验证了该方法在稳定性感知和辅助控制方面的应用潜力,为外骨骼、动力假肢等可穿戴设备提供了可靠的运动预测信息,推动了其向更智能、更安全的人机交互方向发展。
Xian H, Xiong J, Zhang Y, et al. Estimation and Prediction of CoM with Terrain Feature Embedding During Walking[J]. IEEE Transactions on Automation Science and Engineering, 2025.

 综合新闻
综合新闻 科研动态
科研动态
