近日,哈尔滨工业大学(深圳)医工学院冷雨泉教授团队在机器人领域国际期刊 Biomimetic Intelligence and Robotics 上发表题为 “Joint Moment Estimation for Hip Exoskeleton Control: A Generalized Moment Feature Generation Method” 的研究论文,提出了一种具备个体泛化能力的髋关节力矩估计方法。该研究基于编码器采集的关节运动数据,构建了广义力矩特征生成与估计框架,实现了对新用户髋关节力矩的实时、精确估计,为穿戴式外骨骼提供更高效的助力控制方式,助力其向个性化、自适应方向发展。
髋关节在行走中提供了下肢40%以上的正功输出,是实现步态助力的关键部位。外骨骼设备可有效降低能耗、减轻肌肉负担,尤其适用于负重作业人员、老年人以及步态障碍患者。然而,在不同用户间,由于体型、生理结构及行走习惯差异,传统基于通用模型的力矩估计方法难以兼顾准确性与适应性,影响助力控制的效果和稳定性。
尤其是在无需复杂测量设备的实际应用中,仅依赖编码器等轻量级传感器进行即刻力矩估计,既需考虑预测精度,也需保证系统响应的实时性与通用性,成为当前外骨骼控制系统设计中的关键挑战。
针对上述问题,该研究提出了一种基于广义力矩特征(Generalized Moment Feature, GMF)的力矩估计框架,结合神经网络表示学习、序列建模与个体特征融合,实现了多用户、多步速条件下的力矩高效估计与自适应控制。
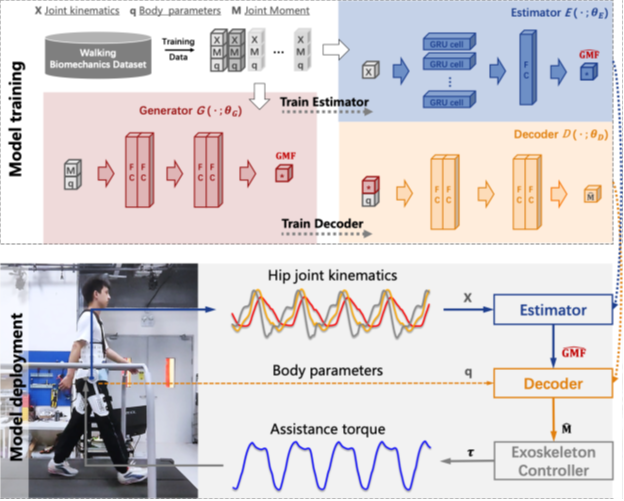
该方法包括三大模块:
广义力矩特征生成器:以用户身高、体重与真实力矩为输入,生成具备个体无关性的隐空间特征,用于增强估计模型的泛化能力;
GRU快速估计器:利用编码器采集的关节角、角速度等运动学数据,预测当前时刻的广义力矩特征;
特征解码器:将预测出的GMF结合个体参数解码为实际力矩值,实现对髋关节即刻力矩的个性化还原。
研究在包含20名健康个体、覆盖28种行走速度的大规模公开数据集上进行了验证。结果表明,该方法在新用户上的平均估计误差为 0.1180 Nm/kg,相比无个体参数输入模型降低了 6.5%。
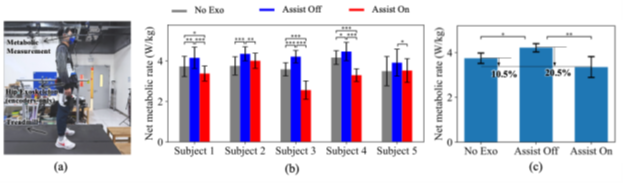
进一步,将该方法部署于自主研发的髋关节外骨骼系统,并开展实地助力实验。实验结果显示,相较于未助力状态,使用该方法的控制器可使使用者的净代谢率降低 10.5%,展现出明显的生理助力效果与实用性。
本研究首次系统提出了广义力矩特征生成与解码机制,在保持模型结构轻量、输入传感简单的前提下,实现了对个体差异的建模与消融,为多用户下髋关节力矩估计提供了全新思路。该方法不仅在估计精度与计算效率上达成良好平衡,更具备在编码器等嵌入式系统上的可部署性,适配多种穿戴式设备的控制需求。
研究成果为实现更加智能、高效的个性化外骨骼助力控制奠定了理论与工程基础,也为未来多场景、多群体的人机协同系统提供了重要技术支撑。

 综合新闻
综合新闻 科研动态
科研动态
