近日,哈尔滨工业大学(深圳)医工学院冷雨泉教授团队在机器人领域国际期刊IEEE Transactions on Cognitive and Developmental Systems发表题为 “AJaP: An Adaptive Network for Hip Joint Angle Prediction in Assistive Walking with Continual Learning” 的研究论文,首次提出仅依赖电机编码器的关节角度自适应预测框架。该研究通过神经网络及持续学习技术,实现了穿戴式机器人对使用者髋关节运动轨迹的高精度实时预测,为外骨骼设备的自然交互与稳定性控制提供了新范式。
随着下肢外骨骼机器人在康复训练与运动辅助领域的广泛应用,精准预测人体关节运动意图成为提升人机协同性能的关键。传统方法主要依赖表面肌电信号(sEMG),但存在三大局限:
1. 信号处理复杂:sEMG需繁琐预处理且易受皮肤状态干扰;
2. 穿戴负担重:传感器贴附位置需精准定位,易引发使用者不适;
3. 泛化能力弱:难以适应个体步态差异、地形变化及传感器漂移。
现有预测方法在真实场景部署时面临计算效率低、自适应能力不足等挑战,制约了可穿戴设备的实用化进程。
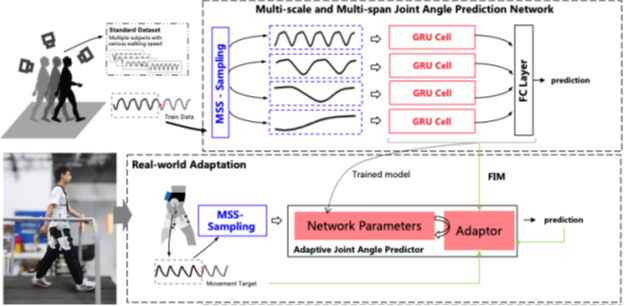
针对上述挑战,团队提出自适应关节角度预测器(AJaP),其创新框架包含两大核心技术:
1. 多尺度-多跨度特征提取网络:提出MSS-Sampling算法,将历史关节角度序列分解为微观尺度(关节角速度/加速度)与宏观尺度(步态周期/运动模式)双层次特征;构建轻量化GRU融合模型,通过门控循环单元整合多尺度信息,实现未来50-200ms关节角度的高效预测
2. 持续学习自适应机制(AJap):引入抗遗忘优化策略,基于弹性权重固化(EWC)技术,在适配新用户时保留已有知识,避免模型灾难性遗忘;实现在线实时优化,在 1 分钟以内即可完成模型更新,在个体差异、地形切换场景下预测精度提升59.76%-64.77%。
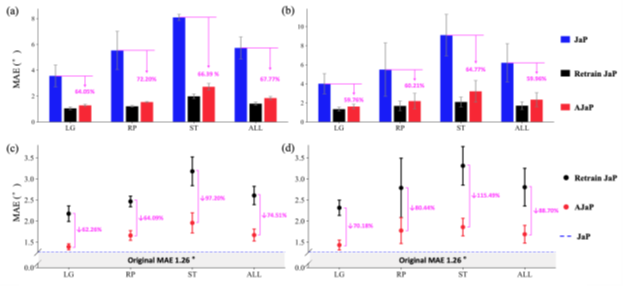
研究通过离线场景与真实世界实验来验证方法有效性:
1. 离线数据集测试:在22名受试者跨速度行走数据中,所提出的角度预测神经网络在50ms/100ms/200ms预测的均方误差仅0.78°、1.58°、2.59°;
2. 穿戴外骨骼实测:8名受试者在平地、斜坡、楼梯行走时,AJAaP将预测误差分别降低了59.76%、60.21%、64.77%,同时灾难性遗忘程度相较于重训练模型降低了70.18%、80.44%、115.49%。
本研究首次实现无肌电传感器的关节角度精准预测,突破传统方法对复杂生物信号的依赖,将:
1. 推动人机自然交互:通过预测运动意图,使外骨骼主动适配使用者步态,提升助力平滑性;
2. 增强场景适应性:融合持续学习机制,有效应对用户差异、地形突变等动态场景;
该方法已应用于团队研发的髋关节外骨骼系统,未来将拓展至全身协同控制与康复医疗领域,助力我国智能康复装备自主创新。

 综合新闻
综合新闻 科研动态
科研动态
